让自动驾驶汽车注意路况、看懂交通标志、检测对象并为其分类、感知速度/轨迹以及其他车辆并不容易——更重要的是,它必须能自行在地图上定位,才能确切地知道驾驶的目的地。
高度自动化的车辆在追踪周围环境时,必须依靠很多传感器,包括摄像头、雷达、超声波、GPS天线,以及利用光脉冲测距的光达(Lidar)组件。每一种传感器都有其优缺点。
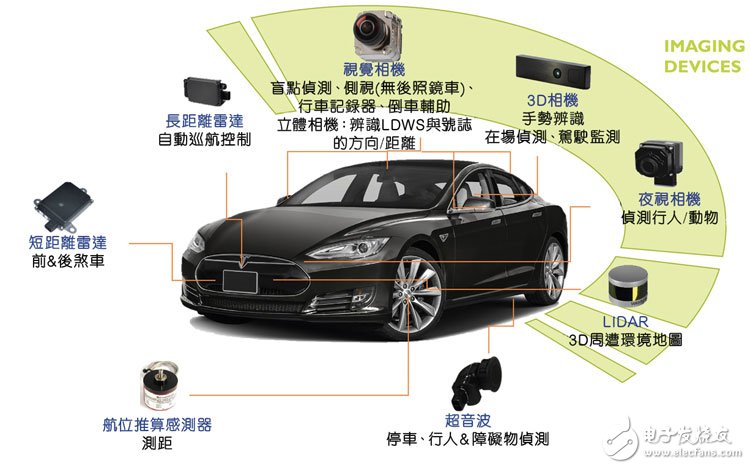
图1:安装在车辆上的一系列传感器技术
视觉摄像头 盲点检测、侧视(无后照镜车)、行车记录仪、倒车辅助 立体摄像头:识别LDWS与标志的方向/距离 3D摄像头 手势识别 现场检测、驾驶监测 夜视摄像头 检测行人/动物 LIDAR 3D周围地图 超声波 停车、行人&障碍物检测 航位推算传感器 测距 短距离雷达 前&后煞车 长距离雷达 自动巡航控制
我们首先应弄清楚如何最有效地填补传感器固有的缺陷。第二步可能更为重要,即开发最佳策略,将不同的数据流结合起来,使关键信息不至于遗失。每一种传感器都以自身的画面更新速率传送数据已经是个问题,传感器融合就更复杂了——因为有些传感器提供原始数据,而其他传感器则提供自己的对象数据答案。
2017年,我们看到了感知技术方面的一连串进展。VSI Labs创办人兼负责人Phil Magney表示:“感知是自动驾驶汽车(AV)软件堆栈的一个主要领域,而且在这方面还有很多创新。”
科技公司、一级供货商和OEM一直急于取得自家公司缺乏或无法自主开发的传感器技术。同时,过去两年来已经出现了多家感知传感器新创公司,其中有许多都关注尚处于萌芽阶段的自动驾驶汽车市场。
英特尔收购Mobileye
2017年汽车行业最大的收购交易是英特尔(Intel)以153亿美元买下Mobileye。
由于Mobileye已经在高级驾驶辅助系统(ADAS)和自动驾驶汽车的汽车视觉领域占据明显的领先地位,收购Mobileye之举使得英特尔在自动驾驶汽车竞赛中稳居有利地位。
尤其是考虑到视觉是自动驾驶汽车中唯一不可或缺的传感器技术,这项收购案显得更重要。英特尔表示打算将Mobileye的“计算机视觉、传感、融合、地图建构和驾驶策略”与英特尔的“开放计算平台”相结合。
Magney将摄像头形容为“必备的传感器”,他解释说,具有以高分辨率采集图像的能力,才能让摄像头更有效地分类对象。现在的摄像头还支持彩色显示。那么弱点呢?Magney补充说:“摄像头的深度不如光达。”