电工问答2026-03-07
机器人系统主要由四个子系统组成:机械、执行器、测量和控制。一个关键挑战是关节运动控制对低速和高扭矩的要求不允许有效利用伺服电机的机械特性,相反,这在最佳操作条件下产生高速和低扭矩。
 基于MCS-51单片机的定时报警器电路原理图
基于MCS-51单片机的定时报警器电路原理图
时间:2026-03-07
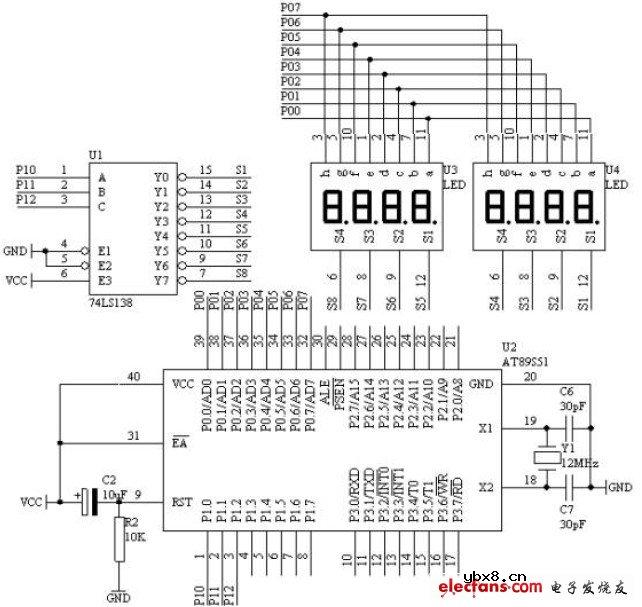
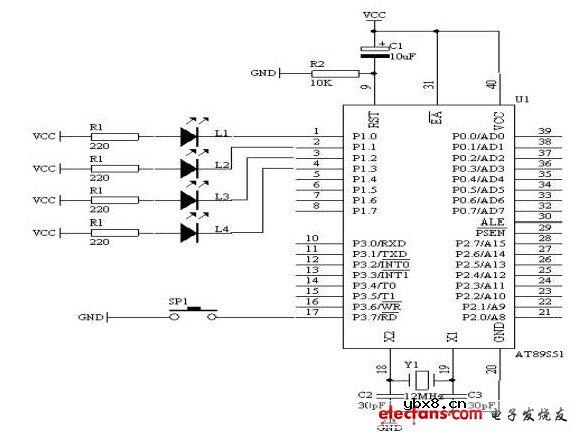 基于C51单片机的按键识别原理图
基于C51单片机的按键识别原理图
时间:2026-03-07
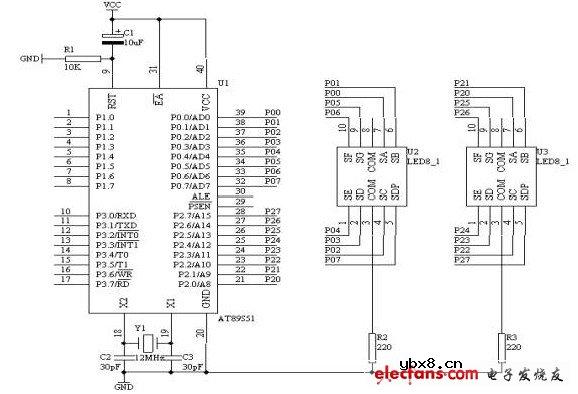 基于C51单片机的计时器设计原理图
基于C51单片机的计时器设计原理图
时间:2026-03-07
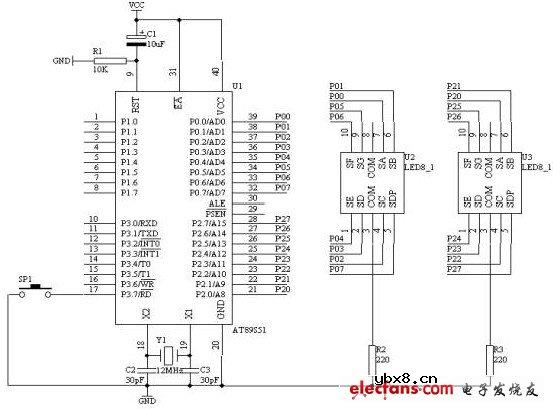 基于C51单片机的手动计数器设计电路图
基于C51单片机的手动计数器设计电路图
时间:2026-03-07
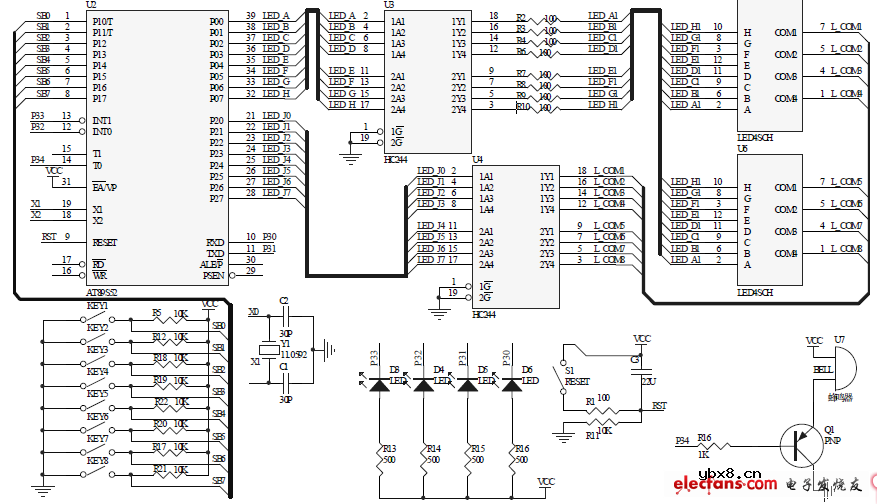
 一键多功能按键识别技术原理图
一键多功能按键识别技术原理图
时间:2026-03-07
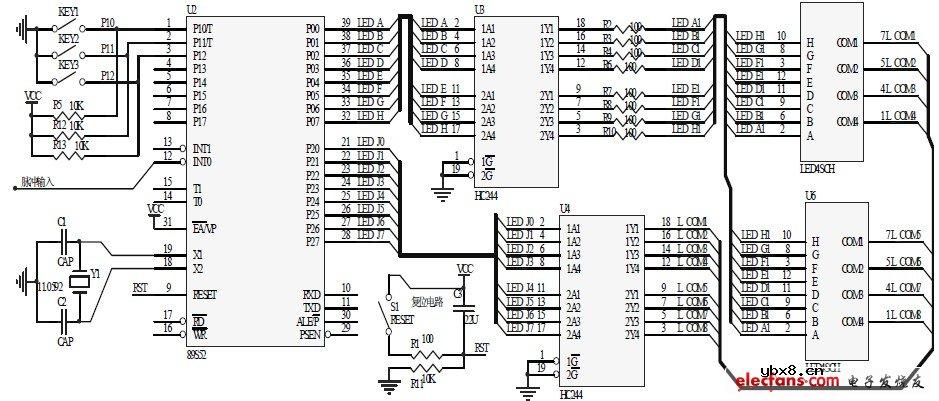 出租车计价器硬件原理图
出租车计价器硬件原理图
时间:2026-03-07
 密码锁硬件电路原理图
密码锁硬件电路原理图
时间:2026-03-07
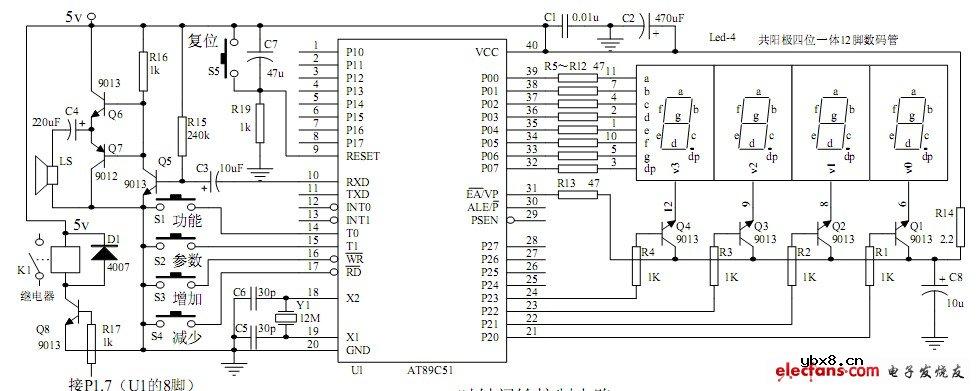 时钟闹铃控制电路原理图
时钟闹铃控制电路原理图
时间:2026-03-07
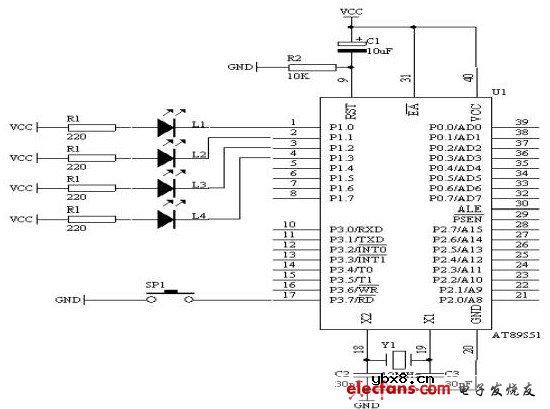
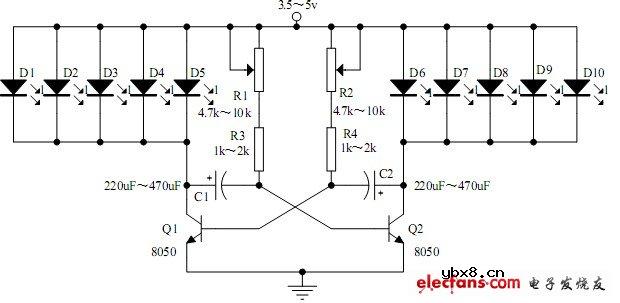 广告彩灯电路原理图
广告彩灯电路原理图
时间:2026-03-07
 拉幕式数码显示电路原理图
拉幕式数码显示电路原理图
时间:2026-03-07
什么是追踪缓存/转接卡?
时间:2026-03-06
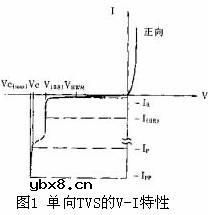 瞬间抑制二极管(TVS)/瞬间抑制二极管(TVS)是...
瞬间抑制二极管(TVS)/瞬间抑制二极管(TVS)是...
时间:2026-03-04
什么是EPIC
时间:2026-03-06
什么是联合并行处理二级缓存?
时间:2026-03-06
什么是Speculative execution/SQRT?
时间:2026-03-06
什么是霍尔传感器
时间:2026-03-05
双向二极管起什么作用?
时间:2026-03-04
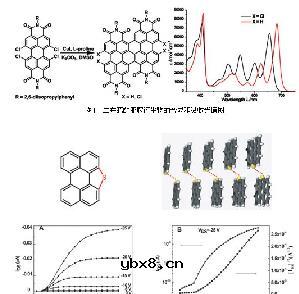 半导体材料的主要种类有哪些?
半导体材料的主要种类有哪些?
时间:2026-03-04
高级封装,高级封装是什么意思
时间:2026-03-04
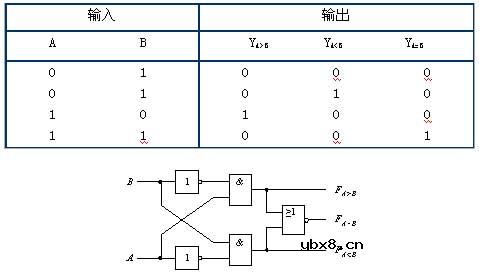 数字比较器,数字比较器是什么意思
数字比较器,数字比较器是什么意思
时间:2026-03-04