引 言
在传感器非线性校正领域,国内外许多学者提出多种方法,并得到广泛应用,传统方法归纳起来可分两类:一类是公式法,即以实验数据为基础,用最小二乘等系统辨识方法求取拟合曲线参数,建立校正曲线的解析表达式;另一类是表格法,以查表为手段,通过分段线性化来逼近传感器的非线性特性曲线。
近些年来,随着神经网络的发展,又有不少学者利用神经网络的非线性回归能力,拟合传感器输出与输入的非线性关系,建立传感器传输特性的逆模型,从而使传感器亦即神经网络构成的系统线性化。但是,该方法也存在一定的局限性,主要表现在:1)神经网络存在局部极小和过学习问题,易影响网络的泛化能力,因此,对样本的数量和质量依赖强;2)网络训练结果与网络初值、样本次序等有关,所建逆模型不具备唯一性;3)一般不能给出非线性校正环节(逆模型)的数学解析表达式。
本文在前人研究的基础上,将现代方法与传统方法相结合,提出一种利用最小二乘支持向量机(least squares support vector machine,LS-SVM)的回归算法/辨识传感器非线性逆模型的新方法,最后,通过铂铑30-铂铑6热电偶(B型)非线性校正实例,验证了上述结论。
1、传感器非线性校正原理
大多数传感系统都可用y=f(x),x∈(ξa,ξb)表示,其中,y表示传感系统的输出,x表示传感系统的输入,ξa,ξb为输入信号的范围。y信号可经过电子设备进行测量,但通常是根据测得的y信号求得未知的变量x,即表示为x=f-1(y)。但在实际应用过程中,绝大多数传感器传递函数为非线性函数。
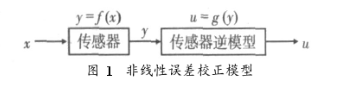
为了消除或补偿传感系统的非线性特性,可使其输出y,通过一个补偿环节,如图1所示。该模型的特性函数为u=g(y),其中,u为非线性补偿后的输出,它与输入信号x呈线性关系,并使得补偿后的传感器具有理想特性。很明显,函数g(·)也是一个非线性函数,若其输入-输出关系恰好为传感器传输特性的逆映射,那么,就能够使补偿结果u在数值上与被测物理量一致。
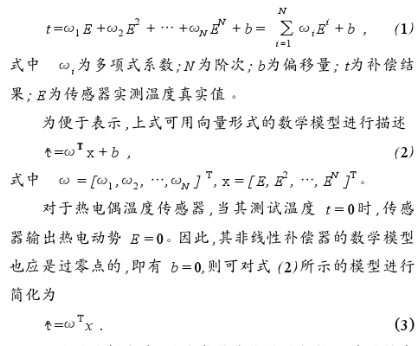
实际上,热电偶在整个测量范围的非线性关系可用分度表表示,但是,在实际进行非线性校正时,构建补偿环节需要的是温度对热电动势的分度函数关系t(E),即需要根据热电动势来反求相应的温度值。可用一个幂级数多项式来拟合温度对热电动势的非线性关系,并作为传感器非线性补偿器的数学模型,这样,不但便于计算,同时,也具有通用性。很明显,多项式的次数越高,拟合的精度也就越高,非线性校正的效果也越理想;当然,进行线性化校正时的计算量也随之上升,因此,在实际应用时应权衡考虑。
不妨设补偿器分度函数具有如下形式
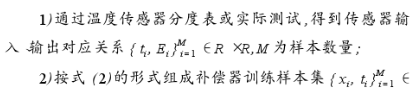
从上述分析来看,对传感器非线性进行校正的关键在于:构建如式(2)或式(3)所示的补偿器模型,对其进行辨识,并求取参数ω与6。因此,可采用系统辨识方法构造温度传感器非线性补偿环节(逆模型),具体步骤如下:
2、 LS-SVM系统辨识原理

3 、实际传感器校正实验
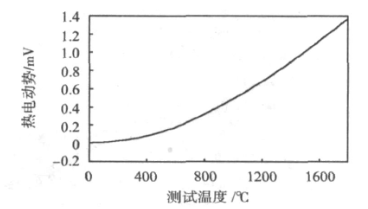
铂铑30-铂铑6热电偶(B型)在0~1 820℃范围内的输入-输出特性如图3所示,在低温段有较严重的非线性,直接影响测量精度,有必要增加非线性补偿环节进行校正使其线性化。
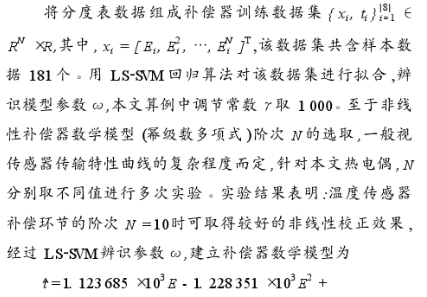
将该数学模型串联在铂铑30-铂铑6热电偶(B型)的输出端,可构成具有非线性自校正功能的传感器系统,通过该校正模型之后,使热电偶系统的线性度由校正之前的0.2123降为0.0353,系统的输入-输出特性如图4所示。

值得注意的是,铂铑30-铂铑6热电偶(B型)在整个测试范围中的传输特性曲线并不是单调递增的。由于在0~100℃段,传感器的分度函数呈现U型分布,例如:与输出热电动势E=0 mV对应的测试温度可能是0℃,也可能是40℃。所以,在低温段,该传感器传递函数的反函数是不存在的,影响了该部分非线性校正的效果;但在中高温段(400~1800℃)传感器输出的具有明显的单调特性,因此,在该温度段用逆模型进行校正取得了相当理想效果。图4所示的实际校正结果也表明:除低温段外,传感器系统的校正值与真实值非常接近。
4、 结束语
通过构建传递函数的逆模型可实现传感器的非线性校正,提高传感器的测量精度。本文针对实际问题,建立幂级数多项式补偿模型,并利用LS-SVM的回归算法辨识模型参数,实现传感器的非线性校正。
本文方法是现代技术(人工智能)和传统方法(最小二乘法)的一种结合,与神经网络为代表的人工智能方法不同,本文方法并没有利用非线性学习能力逼近模型的输入-输出特性;而是利用LS-SVM线性回归算法进行模型参数辨识,因此,可给出补偿器模型的解析形式数学表达式。最后,实际铂铑30-铂铑6热电偶(B型)非线性校正实例验证了本文方法的可行性。
责任编辑:gt