适合小型、低成本化
实现防碰撞报警系统的方法并非只有我们采用的单眼摄像头方式(表2)。此前的防碰撞报警系统大多使用毫米波雷达和激光雷达,但这种系统需要与车辆一体化开发,而且安装车型有限,在价格方面,毫米波雷达更是价格高昂。
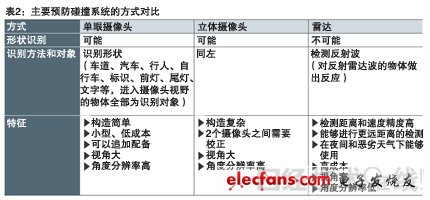
利用摄像头的方式还有富士重工为EyeSight采用的立体摄像头方式。与毫米波雷达方式相比,这种方式的优点在于能够降低系统的成本,而且还能开发出汽车后装产品。
我们公司从1999年创建之初开始,一直致力于开发单眼摄像头方式,目的是为了实现小型化、低成本化及系统简洁化。与采用立体摄像头的方式相比,可检测的距离虽然偏短,但我们认为通过改进图像处理技术可以缩小差距。这是与其他公司形成差异最重要的项目,也是我们倾力开发的核心技术。
系统简洁化是向汽配市场推出产品时必不可少的要素。为了提高检测性能,使用摄像头的防碰撞系统必须在安装时对摄像头位置进行输入和校正。立体摄像头必须仔细调节2个摄像头之间的距离和安装角度。如果把摄像头数量减少到1个,就能够减少校正作业耗费的时间和劳力。
改进硬件,采用黑白摄像元件
C2-270由摄像头单元、显示装置和电缆盒构成。电缆盒使用CAN总线等从车辆读取速度、制动器、雨刷、方向指示器、远光灯的信号。
C2-270除了摄像头单元和摄像元件之外,还内置了核心部分——图像处理SoC(图4)。配备的CMOS图象传感器采用的是美国ApTInaImaging公司生产的分辨率为VGA(640&TImes;480像素)的“MT9V024”。CMOS为1/3英寸,像素间距为6.0μm。视角为水平38度&TImes;垂直30度。镜头的焦距(f)为5.7mm,光圈为F=1.6。
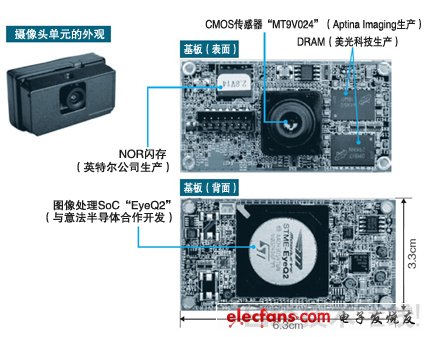
图4:简单的部件构成
“C2-270”的摄像头单元部件数量少,图像处理SoC“EyeQ2”占据了很大的安装面积。
采用的CMOS图象传感器为黑白产品,能够检测到与月圆之夜相当、亮度在0.1lx以下的光线。我们自主开发的曝光调整技术能够优化控制每个场景的曝光。这是因为识别车道线、车辆、标识时的最佳曝光数值各不相同。
除此之外,C2-270还做了其他改进,能够把感光度分成3个阶段,以3帧为1组进行拍摄。在黑暗环境下,首先提高感光度捕捉远处的光线,然后逐渐降低感光度,捕捉极近距离的光线。摄像头本身的拍摄速度虽然为每秒60帧,但在处理时,是按照每秒约15帧的速度进行处理。
可以并行处理七个任务
图像处理SoC——EyeQ2配备了2个美国美普思科技(MIPS Technologies)的32bit CPU内核“MIPS 24Kf”(图5)。该CPU的工作频率为332MHz,还配备了8个用于图像处理的64bit编解码引擎(VCE:video codec engines),同时可以并行处理七个任务。
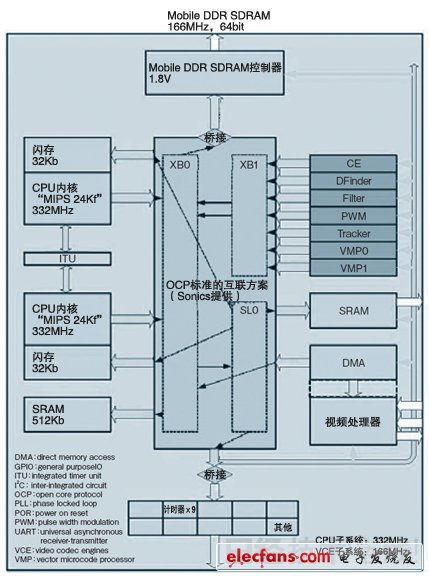
图5:配备两个CPU内核
图像处理SoC “EyeQ2”的结构示意图。CPU内核采用了支持多线程功能的“MIPS 24Kf”。
在接通电源的状态下,C2-270的摄像头将一直监控前方视野,同时持续地识别进入视野的车辆、行人、车道线。因此,具备高速处理性能的图像处理SoC必不可少。在开发之初,我们曾经采用了某大型半导体厂商生产的通用图像处理器,但处理性能不足很快就体现了出来。因此,我们一改过去只开发软件的体制,开始开发硬件,也就是专用于预防碰撞系统的图像处理器。