软件是关键,根据三个特征判定车辆
EyeQ2实际上能够同时处理汽车预防式安全系统和防撞辅助系统所必须的以下检测(图6):(1)前方车辆、(2)车道线、(3)与前方车辆的距离、(4)与前方车辆的相对速度和相对加速度、(5)车道内的前方车辆、(6)弯道、(7)行人。
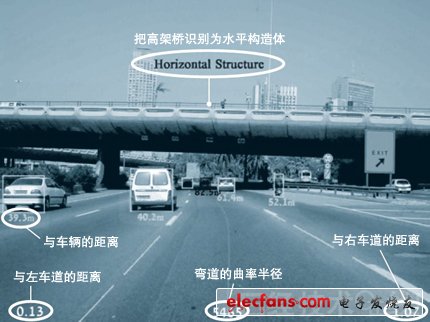
图6:检测车辆和车道线
通过检测车辆和车道线提高了报警精度,可区分同一车道内的车辆及其他车道的车辆。
关于(1)车辆检测,识别车辆依照的是对三个特征的检测,分别是车辆后部的矩形检测、后轮检测、2个尾灯的检测(图7)。系统将通过比对预先保存的几十种车辆形状的图案,判断前方物体是否为汽车。如果是汽车,系统可以判断出后轮轮胎的位置。而尾灯则是夜晚重要的检测要素。

图7:捕捉车辆后方的特征
通过检测长方形或正方形的车辆后部以及2个轮胎、尾灯,判断前方物体为车辆。
在识别车辆时,CMOS传感器上的车宽需要达到13个像素以上,这相当于与车宽为1.6m的车辆相距115m。从CMOS传感器的性能来看,前方的识别限度约为90m。
单眼摄像头也能测量距离
(2)车道线的检测数据将用于车距监测及警示、前方车辆碰撞警示。50m远的宽度为10cm的车道线在CMOS传感器上相当于2个像素。系统将从摄像头图像中识别出车道线,根据摄像头的视野和在前窗上安装的位置等信息计算出车道线的宽度及其与车辆的相对位置,利用卡尔曼滤波器推测车道线。
(3)与前方车辆的距离是利用“远近法原理”计算得出的(图8)。其原理如下,因为摄像头的地面高度(H)已知,所以,路面上前方车辆接触地面的位置比水平面上无限远的一点(延伸焦点,FOE:focusof expansion)略低几度。
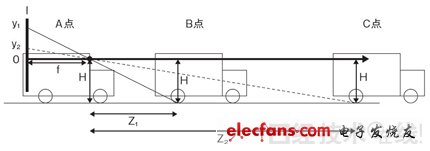
图8:车距检测的原理
单眼摄像头检测车距利用“远近法原理”。事先测量出摄像头的地面高度H,根据关系公式计算出距离Z。
映射到摄像头内部的CMOS传感器上的图像的高度(y)随与前车(后轮轮胎与道路的接触面)的距离而变化。摄像头的焦距(f)同样为已知条件。按照“H:Z=y:f”计算,即可求出与前车的距离Z。而且,距离碰撞的时间也可以根据“Z/相对速度”的公式求出。
攻克检测行人这一难题
与车辆的识别相比,(7)行人检测的难度要大得多。行人不同于车辆,动作、服装、身体各部分的变化要素很多,而且还需要与街上的建筑、汽车、电线杆、树木等背景图案区分开来。
为了在有人走向行驶车道时尽可能缩小检测延迟,对于车道外行人的检测必不可少。因此可以容许出现某种程度的误判。
提高行人检测的精度依靠的是“单帧分类”和“多帧认证”两个步骤。首先通过“单帧分类”判断出“好像是行人”,然后再转入“多帧认证”,当检测到行人进入车道内时提高等级,采取立即发出报警等处理方式。
在行人识别中,系统将把推测为行人的图像分成9个区域提取特征(图9),结合多帧的动态变化提高精度。识别到的VGA分辨率的纵长长方形行人图像将在调整到12&TImes;36像素后进入“单帧分类”处理。根据汇总了3~25m范围内15万个广泛的行人事例(考虑到了动作和停顿、照明、背景图案、气象条件、天气下的可视条件等)的测试数据集进行分类(注3)。
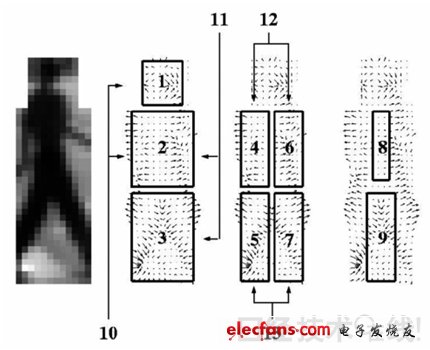
图9:提取行人特征
把拍摄的图像分成9个区域提取特征,识别其是否为行人。
(注3)数字依照Mobileye发表的论文,与现在的产品参数可能存在差异。
测试数据集根据在日本、德国(慕尼黑)、美国(底特律)、以色列各国的市区行驶50个小时获得的数据制成。这种方法在误判率为5.5%的情况下,检测率可达90%。考虑到检测率与误判率的均衡,最终采用的检测率为93.5%,此时误判率约为8%。
对于“单帧分类”无法检测出的情况,在“多帧认证”这一步中,考虑到了动态步伐和移动检测、再检测、脚部位置检测,目的是区分行人与背景中的静止物体(电线杆、树木、护栏)的办法。借助以上改进,系统在白天能够识别出30m前方身高在1m以上的行人。
摄像头方式特有的弱点
我们的防碰撞报警系统也存在弱点。因为是基于摄像头进行图像识别,所以人眼看不到的东西无法识别。在识别车道线时,掉色的车道线、在雨雪覆盖下难以辨识的车道线可能无法识别。
在隧道的入口和出口附近,前方车辆与隧道影像重叠也可能造成误报;前方车辆映照在被雨水淋湿的道路上的倒影也有可能造成误报;当太阳位于靠近地平线的正前方时,摄像头有时会无法正确识别前方车辆;而且,当摄像头正前方的前窗上有水滴时,系统有可能发生鱼眼镜头效应,对前方车辆的大小判断错误(注4)。
(注4)以上是Mobileye技术部门列举的可能发生误判的场合和条件。
未来将把自动驾驶也纳入视野
为了改善这些弱点,我们已经着手开始改进图像处理SoC。目前正在与意法合资意法半导体合作开发名为“EyeQ3”的第3代产品。计划在2014年开始供应配备该SoC的产品。
EyeQ3内嵌4个支持多线程的“MIPS32内核”,每个CPU内核都配备了我们的VMP(vector microcode processor)。我们计划通过灵活分配控制与数据处理,使其性能达到EyeQ2的6倍。
而且,我们还计划实现支持多摄像头输入等大容量影像数据处理。如果除了前方之外,摄像头还能安装在后方和侧面用以获取信息,应该能实现更可靠的防碰撞报警系统。
随着摄像头与汽车的融合,自动驾驶也已经进入了我们的视野,现在此技术已经着手开发。需要解决的课题虽然很多,但我们每天都在积极地迎接挑战。在今后,Mobileye依然将全力开发更加方便大众的汽车技术。